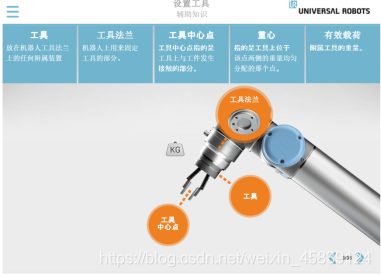
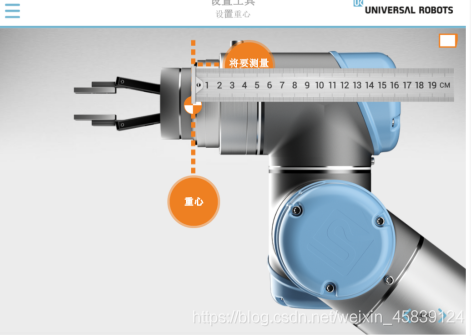
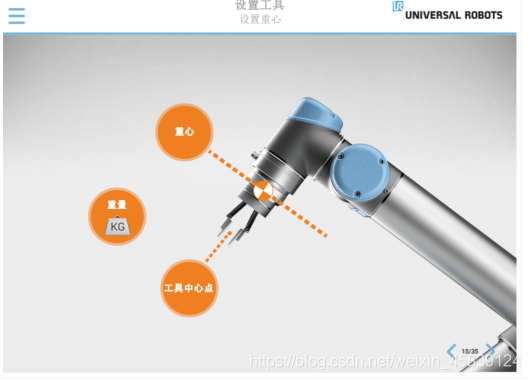
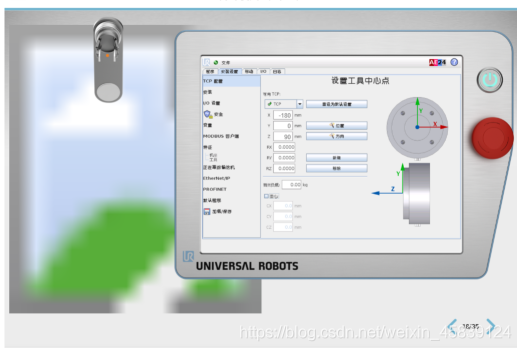
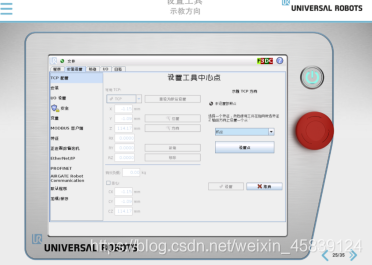
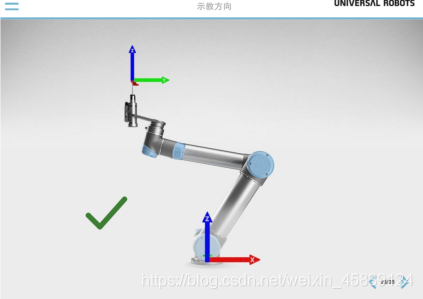
设置工具
优傲机器人新闻中心
优傲机器人代理
 产品:83
产品:83
 联系我们
联系我们
 UR优傲机器人联系方式 UR优傲机器人联系方式
新闻分类 |
优傲机器人新闻中心 ur机器人计算机模拟仿真,ur机器人编程-设置工具--UR协作机器人
发布时间:2022-07-14 浏览次数:1542 返回列表
|
联系热线:13122496309 联系人:邹工 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 优傲机器人代理